JSON API
The JSON formatted data is common and widely used by many programming languages. Gate services allow you to convert Luos engine information into JSON objects, enabling conventional programming languages to interact with your device easily.
To do that, you must add a specific app service called a gate on your device.
How to start using the JSON API
Before using your device through JSON, you have to be connected to the communication flow depending on the node type hosting your gate service.
Then you can start the gate by sending:
{"detection": {}}\n
This command asks the gate to start a topological detection, create a routing table, convert it into JSON and send it back to you.
Routing table messages
Make sure to read and understand how the routing table works before reading this part.
After the gate starts, the first message you receive is a routing table.
This first message is essential because it contains all the information allowing you to create a code object for your device, including all its features.
Routing table structure
A routing table in JSON consists of a list of the nodes present in the Luos network:
{
"routing_table": [
{
// node 1
},
{
// node 2
},
{
// node 3
}
// ...
]
}
Nodes information
Each listed node of the network has basic node information and a list of hosted services:
{
// node 1
"node_id": 1,
"certified": true,
"port_table": [1, 2],
"services": [
{
// service 1
},
{
// service 2
}
// ...
]
}
To understand the meanings of uuid and port_table, please refer to the routing table page.
Services
Each listed service of a node has basic services information:
{
// service 1
"type": "Type",
"id": 1,
"alias": "Alias"
}
To understand the meanings of type, id and alias, please refer to the service page.
Full routing table example
{
"routing_table": [
{
"node_id": 1,
"certified": true,
"port_table": [2, 65535],
"services": [
{
"type": "Gate",
"id": 1,
"alias": "r_right_arm"
}
]
},
{
"node_id": 2,
"certified": true,
"port_table": [4, 1],
"services": [
{
"type": "State",
"id": 2,
"alias": "lock"
},
{
"type": "Unknown",
"id": 3,
"alias": "start_control"
}
]
},
{
"node_id": 3,
"certified": true,
"port_table": [5, 3],
"services": [
{
"type": "Imu",
"id": 4,
"alias": "gps"
}
]
},
{
"node_id": 4,
"certified": true,
"port_table": [65535, 4],
"services": [
{
"type": "Color",
"id": 5,
"alias": "alarm"
},
{
"type": "Unknown",
"id": 6,
"alias": "alarm_control"
}
]
}
]
}
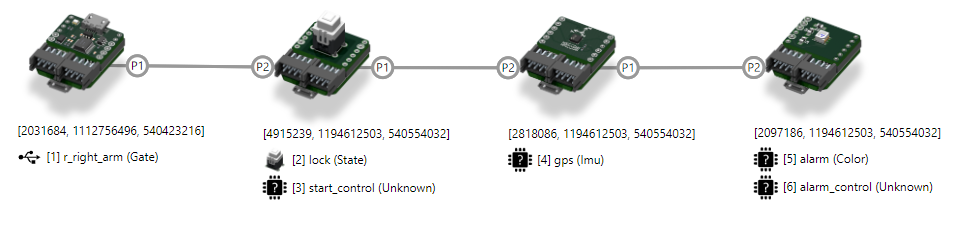
Below is a visual representation of this routing table:
Service's information messages
When the JSON routing table is transmitted, the gate updates and streams your network data with services information.
This JSON is a "service" object listing all the services by their alias and the values they send:
{
"services": {
"service_alias1": {
"value1": 12.5
},
"service_alias2": {
"value1": 13.6,
"value2": [1, 2, 3, 4]
}
}
}
You can use the same JSON object structure to send data to services.
Here is the list of all values that services can use:
| Value name | Definition |
|---|---|
| power_ratio | Percentage of power of an actuator (-100% to 100%) |
| target_rot_position | Actuator's target angular position (can be a number or an array) |
| limit_rot_position | Actuator's limit angular position |
| limit_trans_position | Actuator's limit angular position |
| limit_power | Limit ratio of an actuator's reduction |
| limit_current | Limit current value |
| target_rot_speed | Actuator's target rotation speed |
| target_trans_position | Actuator's target linear position (can be a number or an array) |
| target_trans_speed | Actuator's target linear speed |
| time | Time value |
| compliant | Actuator's compliance status |
| pid | Set of PID values (proportional, integral, derivative) |
| resolution | Sensor's resolution value |
| offset | Offset value |
| reduction | Ratio of an actuator's reduction |
| dimension | Dimension value |
| volt | Voltage value |
| current | Electric current value |
| reinit | Reinitialisation command |
| control | Control command (play, pause, stop, rec) |
| color | Color value |
| io_state | IO state |
| uuid | Service's uuid |
| rename | Renaming an alias |
| revision | Firmware revision |
| trans_position | Translation position value |
| trans_speed | Translation speed value |
| rot_position | Rotation position value |
| rot_speed | Rotation speed value |
| lux | Lux (light intensity) value |
| temperature | Temperature value |
| force | Force value |
| moment | Torque value |
| power | Power value |
| linear_accel | Linear acceleration value |
| gravity_vector | Gravity vector value |
| compass | Compass value |
| gyro | Gyroscope value |
| accel | Acceleration value |
| euler | Euler angle value |
| quaternion | Quaternion values |
| rotational_matrix | Rotational matrix values |
| heading | Heading |
| pedometer | Steps number value |
| walk_time | Walk time value |
| luos_revision | Luos engine's version |
| luos_statistics | Luos engine's memory usage statistics [Rx stack, Luos engine stack, Tx stack, Dropped messages, Loop delay, Send retry max number] |
Here is an example of a message sent by a potentiometer service containing the rotation angle of the associated potentiometer:
{
"services": {
"potentiometer_m": {
"rot_position": 12.5
}
}
}
Here is an example of a message sent by a gate service about Luos engine's statistics:
{
"services": {
"gate": {
"luos_statistics": {
"msg_stack": 60,
"luos_stack": 53,
"msg_drop": 0,
"loop_ms": 16,
"fail_ratio": 0,
"nak_max": 1,
"collision_max": 5
}
}
}
}
Custom parameters and specific messages
Some messages are specifically handled:
Custom parameters can be defined and sent to services through the JSON API, either with Python (Pyluos) or any other programming language on a computer side. Here is an example of a C function that can be implemented in order to send commands to services in a Luos Network, through a gate:
def sendCmd(s, cmd, sleep_time=0.5):
cmd = cmd + '\network'
print(cmd)
s.write(cmd.encode())
time.sleep(sleep_time)
s = serial.Serial(sys.argv[1], 1000000)
# detect Luos network
sendCmd(s, '{"detection": {}}')
# set speed mode and compliant mode
sendCmd(s, '{"services": {"controller_moto": {"parameters": 2441}}}')
# set pid parameters
sendCmd(s, '{"services": {"controller_moto": { "pid": [20, 0.02, 90]}}}')
# set speed mode and non compliant mode
sendCmd(s, '{"services": {"controller_moto": {"parameters": 2440}}}')
Parameters are defined by a 16-bit bitfield.
| Object | Definition | Structure | Service(s) |
|---|---|---|---|
| parameters | enabling or disabling some measurement | Link to structure (GitHub) | Stepper, Controller-motor, Servo |
| parameters | enabling or disabling some measurement | Link to structure (GitHub) | Imu |
Other specific messages:
| Object | Definition | Service(s) |
|---|---|---|
| register | Motor memory register filed with [register_number, value] | Dynamixel, void |
| set_id | A set id command | Dynamixel, void |
| wheel_mode | The wheel mode parameter for Dynamixel servomotors True or False | Dynamixel, void |
| delay | reduce services refresh rate | Gate |
Services exclusion messages
Services can be excluded from the network if a problem occurs (see self-healing for more information). In this case, the gate sends an exclusion message indicating that this service is no longer available:
{ "dead_service": "service_alias" }
Node assert messages
Nodes can assert if a critical issue occurs (see self-healing for more information). In this case, the gate sends an assertion message indicating that this node is no longer available and some details about the crash:
{
"assert": {
"node_id": 3,
"file": "/Users/foo/luos/Examples/Drivers/Button/button.c",
"line": 75
}
}
Sending large binary data
Binary data such as, for example, a motor trajectory can't be included in a JSON file if it is too large. In order to allow this type of transmission, the size of the binary data is sent through the JSON, followed by the actual data in binary format.
If the data is short, it can be displayed inside the JSON as a regular value (see the different values in service's information messages section), or as a table of several values (for example a motor trajectory).
If the data is large, the defined value must be a table of one element, containing only the size of the binary data to be transfered in bytes.
The following example shows a transfer of binary data of 1024 bytes.
{
"services":{
"service_alias1":{
"rot_position":[1024]
}
}
}
###BINARY_DATA###