ROS 2 package example: Shared-bike example tutorial
This is a Luos example using ROS 2, the shared-bike application, that works this way:
- The bike's LED pops up in steady green when it is idle.
- Shake the IMU while it is idle, meaning the bike is being stolen; the RGB alarm then flashes in red.
- Press the state button to acknowledge the alarm.
- Press again to start riding the bike, the bike's LED slightly blinks in green.
- Press again when you stopped riding the bike, it becomes idle again.
It relies on the 3D visualizer embedded in ROS 2, named RViz 2:
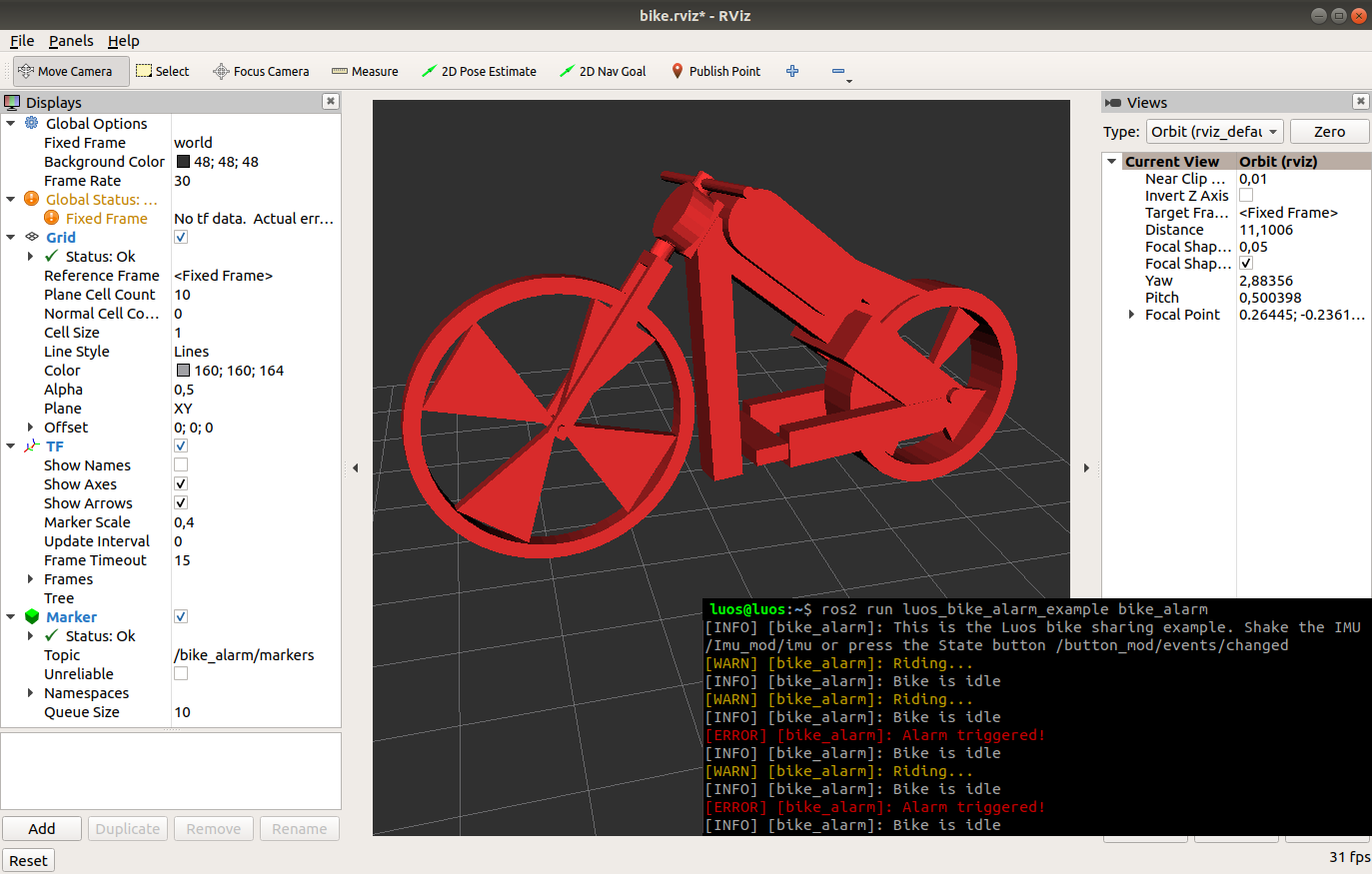
Test the example
This example package relies on luos_interface. Make sure you first installed it by following its own procedure.
Then, download the example package and build your workspace with colcon:
~/ros2_ws/src/$ git clone https://github.com/aubrune/luos_bike_alarm_example.git
~/ros2_ws/$ colcon build --symlink-install # Build the ROS workspace
~/ros2_ws/$ source ~/.bashrc # Source all new launches messages and resources
Plug at least a Luos Imu node and a gate to your computer, as well as optional RGB and State services. The expected Luos services' aliases are the default. If they are not, update the topic names with your custom aliases.
Then, start the bike example from its launchfile:
~/ros2_ws/$ ros2 launch luos_bike_alarm_example example.launch.py
RViz2 will pop up and show a 3D bike. Shake the Luos Imu node in order to update the RViz2 view in real-time. If the bike is displayed but does not actuate, make sure that Imu data comes from the expected topic /Imu_mod/imu, or try to change the topic name.