Your First Message


What you will learn:
Luos engine aims to exchange information between services by sending messages. In this tutorial, you will learn messages' structure and how to send one to another service.
Part 1: Receiving a message
1. Introduction
A button can be represented (as a LED) by a state-type service. But contrary to the LED, the button will have to send a state value instead of receiving it.
A button service only has to manage a button, so it is kind of dumb! Your button service doesn't know where it needs to send its value, that's why you will have to program a reaction from an external request.
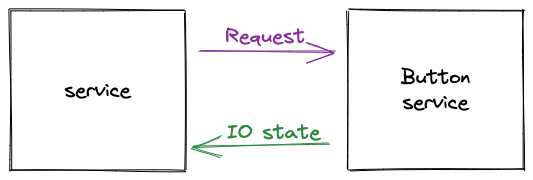
Your button service will have to receive a request message asking for the state of the button, then the service will have to send the state's value back to the asking service.
2. Callback vs. polling
Since the Create a package tutorial, you know how to create a service into a package with a callback.
But Luos engine's services have in fact two different ways to receive messages: callback and polling.
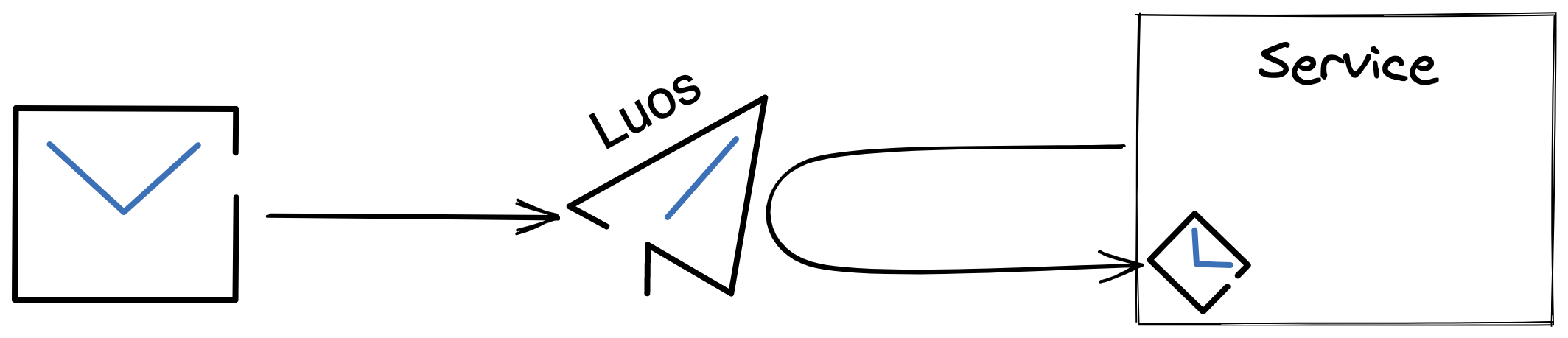
- Asynchronous reception (Callback)
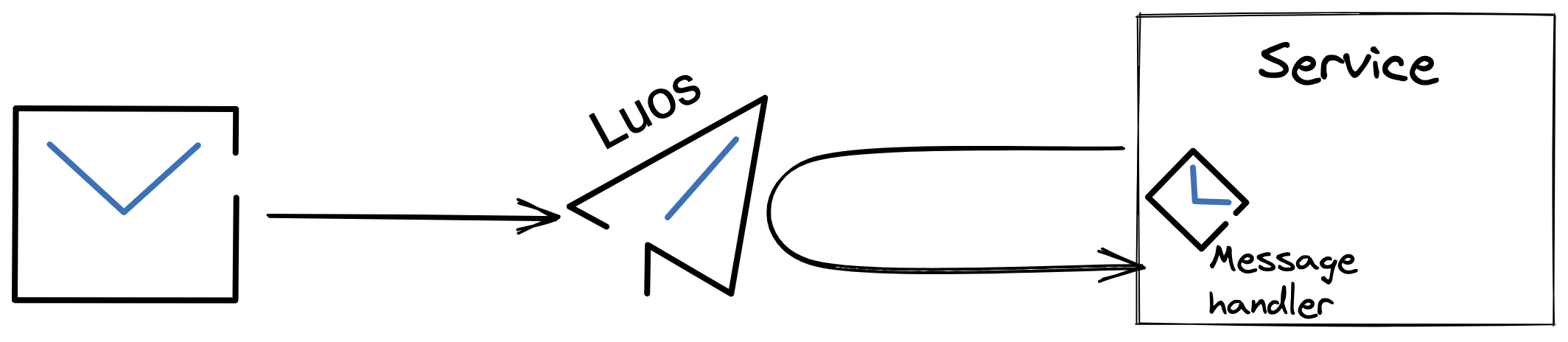
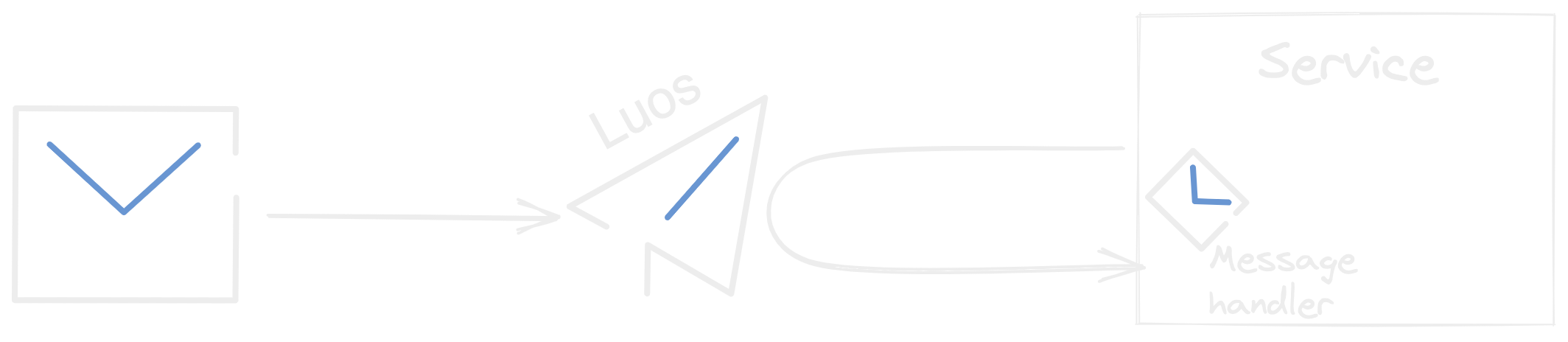
In the callback option, you give to Luos engine a shipping address (called a message handler) allowing it to just deliver the message to your service. Your service needs to be ready to receive and handle the message directly.
- Synchronous reception (Polling)
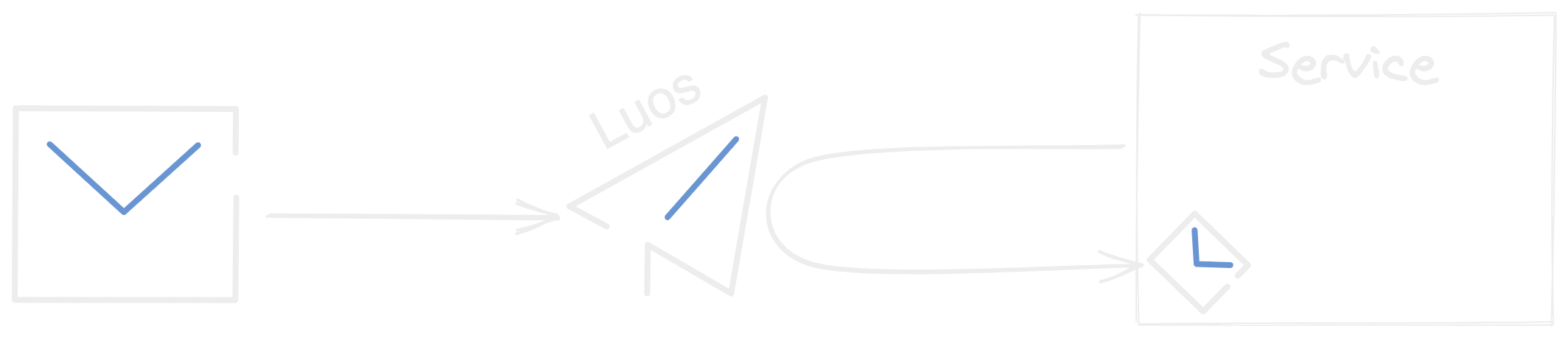
In the polling option, Luos engine doesn't know the shipping address, so your service will have to check if Luos engine has a messages available, and then get it if there is one. Your service can get a message whenever it wants to.
In this tutorial, we will create a service without any callback to explore the polling option.
In PlatformIO IDE, open the folder corresponding to your board in Training/1_First_Service/Work_base from the repository you just cloned or downloaded, and connect the board to your computer with a USB cable.
3. Create a button service
You can create your service in the button package's Init function, but this time do not write any callback in the first argument and put a 0 value instead:
void Button_Init(void)
{
// the two new lines to copy and paste
revision_t revision = {1, 0, 0};
Luos_CreateService(0, STATE_TYPE, "button", revision);
}
void Button_Loop(void){}
Because you did not give any shipping address to Luos engine, your service will have to go get it by itself.
We only need two functions here, called Button_Init() and Button_loop().
Let's try it!
- Compile and upload the project to the board.
- Use
pyluos-shellin a terminal. You should see the following routing table:
┏━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┓
┃ ╭node 1 /!\ Not certified ┃
┃ │ Type Alias ID ┃
┃ ├> Pipe Pipe 2 ┃
┃ ├> Gate gate 1 ┃
┃ ╰> State button 3 ┃
╔>┗━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┛
4. Handle a request using the polling method
To pull messages from Luos engine, we will need to know which service is asking for them. To do that, you need to create a service_t pointer, so that at the service creation Luos engine would allow you to link it to the actual created service:
/*******************************************************************************
* Variable
******************************************************************************/
// the new line to copy and paste
service_t *button_service;
Assign the variable to your service creation:
void Button_Init(void)
{
// the two new lines to copy and paste
revision_t revision = {1, 0, 0};
button_service = Luos_CreateService(0, STATE_TYPE, "button", revision);
}
Because we do not give any message handler to Luos engine, we will have to get the available messages into the service loop function using Luos_ReadMsg function:
void Button_Loop(void)
{
// the new block to copy and paste
msg_t* msg;
if (Luos_ReadMsg(button_service, &msg) == SUCCEED)
{
// We get a message!
}
}
If we enter into this if condition, that tells us we have received a message and that we can deal with it.
To be able to send back the button value, we now need to check if the received message is a proper request:
void Button_Loop(void)
{
msg_t* msg;
if (Luos_ReadMsg(button_service, &msg) == SUCCEED)
{
// the new line to copy and paste
if ((msg->header.cmd == IO_STATE)||(msg->header.cmd == UNKNOW)
{
// We will have to send our button info here
}
}
}
As you can see in this message filtering, this request could be two different commands:
A service can ask specifically for an
IO_STATE.A service can ask for an UNKNOW value because it does not known the returned type of the value.
Sometimes, a service wants an UNKNOW type because it does not specifically know what the returned value will be an IO_STATE type. You can use it as a common way to get any kind of value from services.
Everything is ready for reception, we can now learn how to reply to the request and send a message!